 Главная
Главная Карта сайта
Карта сайта


Система управления складского комплекса роботизированного
СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСА СКЛАДСКОГО РОБОТИЗИРОВАННОГО
Система управления комплекса складского роботизированного (далее «КСР» или «комплекс») предназначена для управления автоматической загрузкой и выгрузкой различных грузов, уложенных в тару.
Комплекс складкой роботизированный представляет собой два параллельно стоящих стеллажа, в проходе которых передвигается робот, опирающийся на верхние и нижние ходовые пути. Приемный стол, смонтированный на торце стеллажа, служит для перегрузки тар с цехового транспорта на робот и наоборот.
Управление работой комплекса дистанционное с автоматизированного рабочего места оператора или с пульта управления расположенного около тележки.
Система управления комплексом обеспечивает:
- дистанционное управление трехмерным передвижение робота;
- полностью автоматическое выполнение роботом команд «Принести», «Отнести» с указанием номеров ячеек;
- полуавтоматическое управление роботов с заданием ряда по вертикали и горизонтали;
- ручное управление роботом с ПЛК (программируемый логический контроллер) командами «Вперед», «Назад», и т.д.;
- ручное управление роботом с пульта управления;
- беспрерывную индикацию в режиме реального времени текущего положения, скорости передвижения робота и состояния ячеек;
- индикацию текущих параметров входного фазного напряжения;
- блокировки аварийных ситуаций не соответствующих режиму управления;
- контроль и архивирование всех действий оператора;
- индикацию и архивирование аварий и предупреждений.
Система управления состоит из следующих объектов:
- шкафа управления с ПЛК;
- абсолютных энкодеров;
- автоматизированного рабочего места оператора;
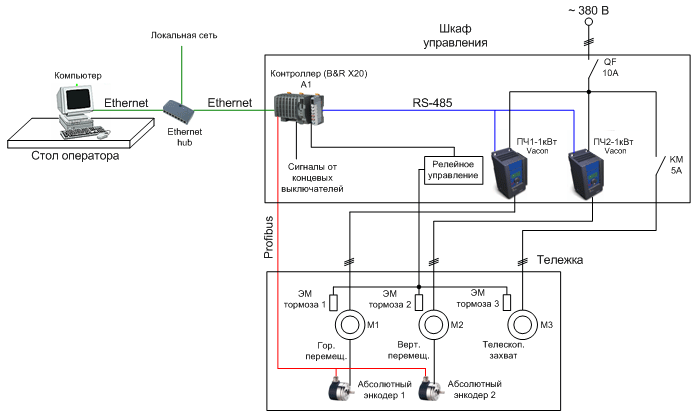
Шкаф управления представляет собой металлический шкаф одностороннего обслуживания, содержащий коммутационную аппаратуру, два преобразователя частоты, микроконтроллер и релейную схему блокировок.
Шкаф управления подключается к сети ~ 380 В через автоматический выключатель, силовая часть подключается через линейный контактор.
Двигатель тележки и двигатель подъемника робота управляются преобразователчми частоты, которые в свою очередь управляются промышленным логическим контроллером (ПЛК) через интерфейс Modbus. Такое управление обеспечивает высокую точность и плавность движения робота и эффективные защиты от перегрузок и других аварийных режимов.
Двигатели, их тормоза и сцепления управляются и контролируются ПЛК.
Контроль положения тележки и подъемника осуществляется по абсолютным экнодерам, расположенным на валах редукторов двигателей тележки и подъемника. Энкодеры по сети Profibus-DP соединены с ПЛК.
Релейная схема ШУ построена на принципе возможности управления, как в автоматическом, так и в ручном режиме с блокировками аварийных ситуаций.
ПЛК связывается с компьютером оператора по локальной сети Ethenet.
ПЛК в своем составе имеет:
процессор;
- модули дискретных входов;
- модуль дискретных выходов;
- интерфейсный модуль Modbus;
- интерфейсный модуль Profibus-DP;
- интерфейсный модуль Ethenet;
- вспомогательное оборудование.
Автоматизированное рабочее место оператора представляет собой компьютер, подключенный к локальной сети через hub. На компьютере установлено специализированное ПО, позволяющее оператору управлять работой комплекса в трех режимах.
В автоматическом режиме контроллер принимает от ПК команды «Принести», «Отнести» совместно с номером ячейки и определяет свои дальнейшие действия согласно алгоритму. В полуавтоматическом режиме контроллер принимает задание на положение и команды «Пуск», «Стоп».
В ручном режиме контроллер принимает от ПК команды «Вперед», «Назад», «Вверх», «Вниз», «Вправо», «Влево» и выполняет их при соблюдении всех условий на выполнение.
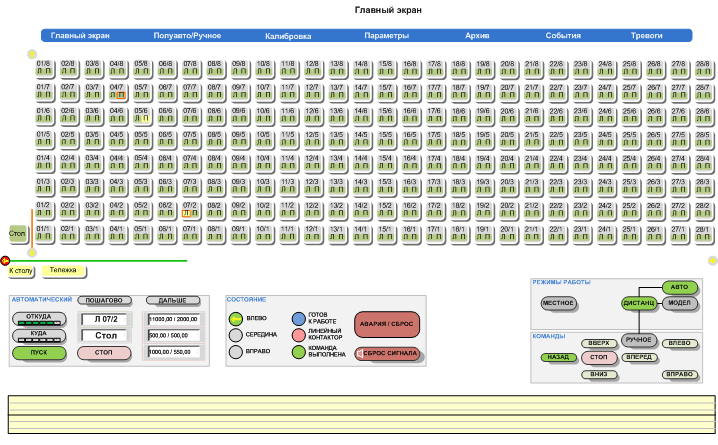
Рисунок 1. Фрагмент специализированного ПО для управления КСР
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ
|
Наименование параметра |
Значение |
| 1. Входное питающее напряжение ШУ (Uвх) трехфазное, В |
380 +10/-15 % |
| 2. Частота входного напряжения, Гц |
50 ± 2 % |
| 3. Вспомогательное напряжение, В |
24 |
| 4. Диапазон регулирования выходного напряжения двигателей тележки, подъемника, телескопа, В |
0…Uвх |
| 5. Диапазон регулирования выходной частоты двигателей тележки, подъемника, телескопа, Гц |
1…50 |
| 6. Степень защиты шкафа управления по ГОСТ 14254-80 |
IP 44 |
| 7. Среднее время восстановления не более, мин. |
40 |
| 8. Срок службы не менее, лет |
15 |
УСЛОВИЯ ОКРУЖАЮЩЕЙ СРЕДЫ
|
Наименование параметра |
Значение |
| 1. Высота размещения над уровнем моря |
до 1000 м |
| 2. Диапазон рабочих температур |
-400С …+300С |
| 3. Диапазон температур хранения |
+00С …+400С |
| 4. Верхнее значение относительной влажности при 35 °С |
90% |
| 5. Окружающая среда | Взрывобезопасная, не содержащая химически активные газы и пары в концентрациях, разрушающих изоляцию |